3.2 LEDs dimmen
Bisher waren die LEDs an oder aus. Nun wollen wir LEDs dimmen und dazu benötigen wir einen Trick, denn die Pins können nur "an"/"aus".
Die Hardware- und Elektronikgrundlagen
Wir benötigen für unsere nächsten Anwendungen:
-
Widerstand (220 Ohm)
-
LED (rot)
-
Drehschalter (Rotary Encoder KY-040)
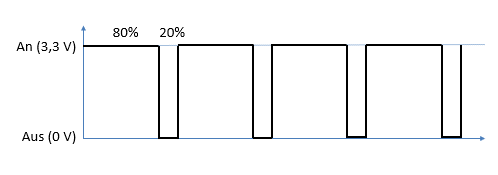
Die Pins kennen nur die Zustände "an"/"aus", aber es gibt den Trick der Pulsweitenmodulation (PWM). Hierbei wird der Pin schnell mit einer hohen Frequenz "an"/"aus"-geschaltet.
Der Duty Cycle (Einschaltdauer) ist der Prozentsatz der Zeit, in der das Signal in einem Zyklus "ein" ist.
-
Ein 100% Duty Cycle (Einschaltdauer) bedeutet, dass das Signal die ganze Zeit "ein" ist (volle Leistung).
-
Ein 0% Duty Cycle (Einschaltdauer) bedeutet, dass das Signal die ganze Zeit "aus" ist (keine Leistung).
-
Ein 80% Duty Cycle (Einschaltdauer) bedeutet, dass das Signal 80% der Zeit "ein" und 20% der Zeit "aus" ist.
Die Einschaltdauer bezieht sich also auf den prozentualen Anteil der Zeit, in der der Strom eingeschaltet ist, im Vergleich zur Gesamtzeit des "an"/"aus"-Zyklus. Im folgenden Diagramm ist ein 80% Duty Cycle dargestellt, der die LED somit auch nur mit 80% der Leistung versorgt.
Die Anwendungen
Wir haben hier drei Anwendungen: zuerst lassen wir die rote LED blinken, aber dabei nicht ausgehen, sondern reduzieren die Helligkeit. Danach soll die rote LED langsam heller werden. Anschließend verwenden wir den Drehschalter, um die Helligkeit der LED einzustellen.
Eine rote LED blinken lassen (100% - 20%)
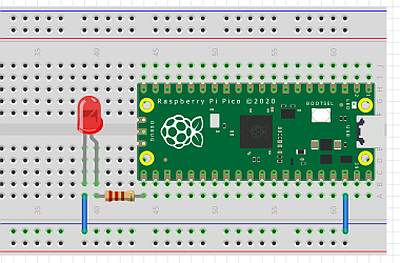
Wir verwenden folgendes Setup (wie zuvor)
-
Pin 38 an Masse
-
Pin 21 (= GPIO 16) an den Widerstand
-
Widerstand an Plus der LED
-
Minus der LED an Masse
Zeile 11: Der Wert 65535 wird verwendet, weil er die maximale Auflösung für den Duty Cycle in der PWM-Implementierung auf dem Raspberry Pi Pico ist. Die Methode duty_u16() erwartet Werte im Bereich von 0 bis 65535, was einer 16-Bit-Auflösung entspricht.
Hinweis: Die Zahl 65535
Bei led.duty_u16 sagt die 16 aus, dass es sich um 16 Bit, also 2 hoch 16 Abstufungen (im Binärsystem) handelt. 2 hoch 16 = 65536. Da wir bei "0" beginnen, ist die größtmögliche Zahl die 65535.
Script verstehen
Was ist im Script fest vorgegeben und was kann man ändern wie man möchte?
Eine rote LED wird langsam heller
Der Aufbau bleibt gleich und wir ändern lediglich das Script
Sourcecode verstehen
Schreiben Sie den Sourcecode so um, dass die LED zuerst 100% hell ist und dann in ca. 3 Sekunden dunkel wird.
Langsamer heller
An welchen beiden Stellen können Sie einstellen, dass die LED nur langsam heller wird?
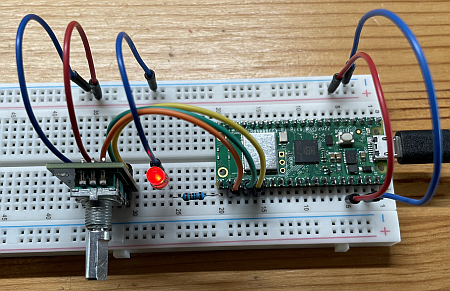
Drehschalter als Input
Bisher haben wir die GPIO-Pins als Output-Pins für LEDs verwendet. Aber nun wollen wir Daten einlesen. Im konkreten Fall wollen wir Eingabewerte des Drehschalters (Bezeichnung KY-040) einlesen.
Das hier gezeigte Script basiert auf dem Sourcecode von Elektronik Kompendium und wurde nur leicht abgeändert.
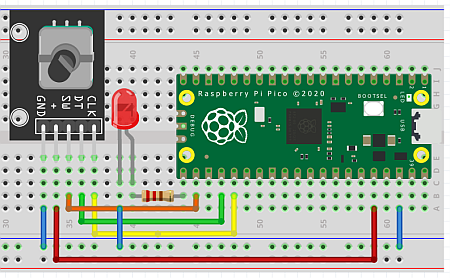
Pinbelegung für Raspberry Pi Pico und KY-040
| Raspberry Pi Pico | KY-040 |
|---|---|
| Verbindung zu Masse | GND |
| Pin 36 | + |
| Pin 22 - GPIO 17 | SW |
| Pin 24 - GPIO 18 | DT |
| Pin 25 - GPIO 19 | CLK |
Zunächst muss die Bibliothek "rotary" von Elektronik Kompendium heruntergeladen und unter dem Namen rotary.py auf dem Pi Pico gespeichert werden.
Script verstehen
Was ist im Script fest vorgegeben und was kann man ändern wie man möchte?
Taster zum Ein- und Ausschalten nutzen
Neu sind:
-
Zeile 9: import time
-
Zeile 30: LED soll am Anfang an sein
-
Zeile 55: Helligkeit nur bei eingeschalteter LED einstellen
-
Alle Zeilen ab Zeile 61
Python
Folgende Fragen wollen wir nun beantworten:
- Welche Python Befehle sind in den bisherigen Scripten vorhanden?
- Welche Operatoren gibt es in Python?
- Welche sind Aufrufe aus Teilen der Bibliothek?
1. Welche Python-Befehle sind in den bisherigen Scripten vorhanden?
| Befehl | Erklärung |
|---|---|
from *bibliothek* import *Klasse* |
Importiert die Klasse aus der Bibliothek |
print(...) |
Gibt eine Nachricht auf der Konsole aus |
def |
Definiert eine Funktion |
if |
Bedingte Anweisung |
elif |
Weitere Bedingte Anweisung |
else |
Alternative Bedingte Anweisung |
while |
Schleife, die solange eine Bedingung erfüllt ist, wiederholt wird |
global |
Deklariert eine Variable als global |
True, False |
Wahrheitswerte |
2. Welche Operatoren gibt es in Python?
A. Rechenoperatoren
| Operator | Erklärung | Beispiel |
|---|---|---|
| = | Zuweisung | a = 5 |
| + | Addition | a + b |
| - | Subtraktion | a - b |
| * | Multiplikation | a * b |
| ** | Potenzierung | a ** b |
| / | Division | a / b |
| % | Modulus (Restwert einer Division) | a % b (z.B. 10 % 3 ergibt 1) |
| // | Ganzzahlige Division | a // b (z.B. 10 // 3 ergibt 3) |
| += | Addition und Zuweisung | a += 3 (z.B. a = 2; a += 3 ergibt 5) |
| -= | Subtraktion und Zuweisung | a -= 2 |
| *= | Multiplikation und Zuweisung | a *= 2 |
| **= | Potenzierung und Zuweisung | a **= 2 |
| /= | Division und Zuweisung | a /= 2 |
| %= | Modulus und Zuweisung | a %= 3 |
| //= | Ganzzahlige Division und Zuweisung | a //= 2 |
B. Vergleichsoperatoren (die als Ergebnis True / False liefern)
| Operator | Erklärung | Beispiel |
|---|---|---|
| == | Gleichheit | a == b |
| != | Ungleichheit | a != b |
| < | Kleiner als | a < b |
| > | Größer als | a > b |
| <= | Kleiner oder gleich | a <= b |
| >= | Größer oder gleich | a >= b |
| and | Logisches UND | a and b |
| or | Logisches ODER | a or b |
| not | Logisches NICHT | not a |
Weitere Details zu diesen Operatoren finden Sie in der offiziellen Python-Dokumentation zu den Operatoren.
3. Welches sind Aufrufe aus Teilen der Bibliothek?
| Aufruf | Erklärung |
|---|---|
| Pin(...) | Initialisiert einen GPIO-Pin |
| PWM(...) | Initialisiert PWM auf einem GPIO-Pin |
| Timer().init(...) | Initialisiert einen Timer mit einer Frequenz und Callback |
| sleep_ms(...) | Pausiert die Ausführung für eine bestimmte Anzahl Millisekunden |
| Rotary(...) | Initialisiert den Rotary-Encoder |
| rotary.add_handler(...) | Fügt einen Handler für den Rotary-Encoder hinzu |
| .freq(1000) | Setzt die Frequenz auf 1000 Hz |
| .duty_u16(value) | Setzt den Duty Cycle auf den angegebenen Wert |
| .ROT_CW | Drehrichtung im Uhrzeigersinn |
| .ROT_CCW | Drehrichtung gegen den Uhrzeigersinn |